Modelo de la colina del músculo
En Biomecánica, Modelo de la colina del músculo se refiere a ecuaciones o Hill para tetanized contracción del músculo o el modelo de 3 elementos. Derivaban de las famosas Fisiólogo Archibald Vivian Hill.
Contenido
- 1 Ecuación al músculo tetanized
- 2 Modelo de tres elementos
- 2.1 Viscoelasticidad
- 3 Véase también
- 4 Referencias
Ecuación al músculo tetanized
Esto es un popular ecuación de estado aplicable a músculo esquelético se ha visto estimulado para mostrar Contracción tetánica. Lo que se refiere tensión la velocidad con respecto a la interna Termodinámica. La ecuación es

donde
 es la tensión (o carga) en el músculo
es la tensión (o carga) en el músculo es la velocidad de contracción
es la velocidad de contracción es la máxima tensión isométrica (o carga) generada en el músculo
es la máxima tensión isométrica (o carga) generada en el músculo coeficiente de reducción de calor
coeficiente de reducción de calor
 es la velocidad máxima, cuando
es la velocidad máxima, cuando 
 es la tensión (o carga) en el músculo
es la tensión (o carga) en el músculo es la velocidad de contracción
es la velocidad de contracción es la máxima tensión isométrica (o carga) generada en el músculo
es la máxima tensión isométrica (o carga) generada en el músculo
 es la velocidad máxima, cuando
es la velocidad máxima, cuando 
Aunque la ecuación de Hill se parece mucho a la ecuación de van der Waals, el anterior tiene unidades de energía disipación, mientras que el último tiene unidades de energía. Ecuación de Hill demuestra que la relación entre F y v hiperbólica. Por lo tanto, cuanto mayor sea la carga aplicada al músculo, cuanto más baja la velocidad de contracción. Del mismo modo, cuanto mayor sea la velocidad de contracción, la más baja la tensión en el músculo. Se ha encontrado esta forma hiperbólica para adaptarse a la constante empírica solamente durante contracciones isotónicas junto a la longitud de reposo.[1]
La tensión del músculo disminuye a medida que aumenta la velocidad de acortamiento. Esta característica ha sido atribuida a dos causas principales. El mayor parece ser la pérdida de tensión como los puentes cruzados de la elemento contráctil y luego la reforma en una condición acortada. La segunda causa parece ser la viscosidad del fluido en el elemento contráctil y el tejido conectivo. Cualquiera que sea la causa de la pérdida de tensión, es una fricción viscosa y por lo tanto se pueden modelar como un fluido amortiguador .[2]
Modelo de tres elementos
 y
y
 .
.
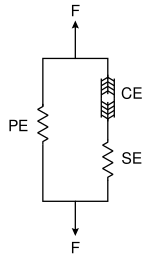
El modelo tres elementos colina del músculo es una representación de la respuesta mecánica del músculo. El modelo está constituido por un (elemento contráctilCE) y dos no-lineal aisladores de muelleuno en serie (SE) y otro en paralelo (PE). El activo fuerza del elemento contráctil proviene de la fuerza generada por la actina y miosina Cruz-puentes de la sarcómero nivel. Es completamente extensible cuando esté inactivo pero capaz de acortar cuando se activa. El tejidos conectivos (fascia, Epimysium, Perimysium y endomysium) que rodean el elemento contráctil influye en la curva de la fuerza-longitud del músculo. El elemento paralelo representa la fuerza pasiva de estos tejidos conectivos y tiene una tejido blando comportamiento mecánico. El elemento paralelo es responsable por la conducta pasiva del músculo cuando es estirado, incluso cuando el elemento contráctil no está activado. Representa el elemento de la serie el tendón y la elasticidad intrínseca de los miofilamentos. También tiene una respuesta de tejidos blandos y proporciona energía almacenando mecanismo.[2][3]
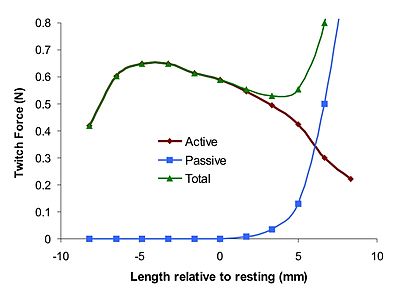
Las características de la fuerza neta de longitud de un músculo es una combinación de las características de la fuerza-longitud de elementos tanto activas como pasivas. Las fuerzas en el elemento contráctil, el elemento de la serie y en el elemento paralelo, ,  y , respectivamente, satisfacer
y , respectivamente, satisfacer

Por otro lado, la longitud del músculo  y las longitudes
y las longitudes  ,
,  y
y  de esos elementos satisfacer
de esos elementos satisfacer

Durante contracciones isométricas la serie componente elástico está bajo tensión y por lo tanto extendía una cantidad finita. Porque la longitud total del músculo se mantiene constante, el estiramiento de los elementos de serie sólo puede ocurrir si hay un acortamiento igual del propio elemento contráctil.[2]
Viscoelasticidad
Los músculos presentan viscoelasticidad, por lo tanto un amortiguador viscoso puede incluirse en el modelo, cuando la dinámica el segundo orden es considerado el movimiento críticamente amortiguado. Un modelo común para la viscosidad muscular es un exponencial amortiguador de formulario, donde

se añade a la ecuación global del modelo, cuya  y
y  son constantes.[2]
son constantes.[2]
Véase también
- Contracción del músculo
Referencias
- ^ Hill, A.V. (octubre de 1938). "El calor de constantes dinámica y acortamiento de los músculos". Proc. r Soc Lond. B (Londres: Royal Society) 126 (843): 136 – 195. Doi:10.1098/rspb.1938.0050.
- ^ a b c d Fung, Y. C. (1993). Biomecánica: Propiedades mecánicas de los tejidos vivos. Nueva York: Springer-Verlag. p. 568. ISBN0-387-97947-6.
- ^ Martins, J.A.C.; Pires, E.B; Salvado, R.; Dinis, P.B. (1998). "Modelo numérico del comportamiento pasivo y activo de los músculos esqueléticos". Métodos computacionales en ingeniería y mecánica aplicada (Elsevier) 151:: 419 – 433. Doi:10.1016/S0045-7825 (97) 00162-X.