Robot



A robot es un dispositivo mecánico automático a menudo que se asemeja a un humano o animal. Los robots modernos son generalmente un máquina electromecánica guiados por un Programa de computadora o circuitos electrónicos. Los robots pueden ser autónoma o semi-autónomas y van desde los humanoides como Hondaes Paso avanzado en movilidad innovadora (ASIMO) y TOSYes TOSY Ping Pong juego Robot (TOPIO) a robots industriales, colectivamente programada enjambre robotse incluso microscópicas Nano robots. Por mímico un aspecto realista o automatizar movimientos, un robot puede transmitir una sensación de inteligencia o pensamiento sus el propios.
La rama de tecnología que trata con el diseño, construcción, operación y aplicación de los robots,[2] así como de sistemas informáticos para su control, regeneración sensorial y procesamiento de la información es robótica. Estas tecnologías lidiar con máquinas automáticas que pueden tomar el lugar de los seres humanos en ambientes peligrosos o procesos de fabricación, o se asemejan a los seres humanos en apariencia, comportamiento y cognición. Muchos de los robots de hoy están inspirados en la naturaleza contribuye al campo de la robótica bio-inspirados. Estos robots también han creado una nueva rama de la robótica: Robótica suave.
Desde la época de la antigua civilización ha habido muchas cuentas de usuario-configurables automatizaciones e incluso autómatas que se asemejan a los animales y los seres humanos, diseñado principalmente como un entretenimiento. Como técnicas mecánicas desarrollado a través de la era Industrial, surgieron más práctico aplicaciones tales como automatizado de máquinas, control remoto y control remoto inalámbrico. Electrónica se convirtió en la fuerza impulsora del desarrollo con la llegada de los primeros electrónicos robots autónomos creado por William Grey Walter en Bristol, Inglaterra en 1948. El primer digital y programable robot fue inventado por George Devol en 1954 y fue nombrado el Unimate. Fue vendido a General Motors en 1961, donde fue utilizado para levantar piezas de metal caliente de fundición a presión las máquinas en la Planta de guía interior Fisher En West Trenton sección de Ewing Township, Nueva Jersey.[3]
Los robots han reemplazado a los seres humanos[4] en la asistencia de realizar esas repetitivas y peligrosas tareas que los seres humanos prefieren no hacer, o es incapaz de hacerlo debido a limitaciones de tamaño, o incluso aquellos tales como en el espacio exterior o en el fondo del mar donde los seres humanos no podrían sobrevivir los ambientes extremos.
Hay preocupación por el creciente uso de robots y su papel en la sociedad. Los robots son culpó por el aumento del desempleo como sustituyen a los trabajadores en un número creciente de funciones.[5] El uso de robots de combate militar plantea preocupaciones éticas. Las posibilidades de robot autonomía y potencial repercusiones han sido abordadas en la ficción y pueden ser una preocupación realista en el futuro.
Contenido
- 1 Resumen
- 2 Historia
- 2.1 Inicios
- 2.2 Sistemas de control remoto
- 2.3 Robots humanoides
- 2.4 Modernos robots autónomos
- 3 Etimología
- 4 Robots modernos
- 4.1 Robot móvil
- 4.2 Robots industriales (manipulación)
- 4.3 Robot de servicio
- 4.4 Robot educativo
- 4.5 Robot modular
- 4.6 Robots colaborativos
- 5 Robots en la sociedad
- 5.1 Autonomía y cuestiones éticas
- 5.2 Robots militares
- 5.3 Relación con el desempleo
- 6 Usos contemporáneos
- 6.1 Propósito generales robots autónomos
- 6.2 Robots de fábrica
- 6.2.1 Producción de autos
- 6.2.2 Embalaje
- 6.2.3 Electrónica
- 6.2.4 Vehículos guiados automatizados (AGVs)
- 6.2.4.1 Primeros robots AGV-estilo
- 6.2.4.2 Tecnologías AGV provisionales
- 6.2.4.3 AGV inteligente (i-AGVs)
- 6.3 Tareas sucias, peligrosas, aburridas o inaccesibles
- 6.3.1 Sondas espaciales
- 6.3.2 Telerobots
- 6.3.3 Fruta automatizado Segadoras
- 6.3.4 Robots domésticos
- 6.4 Robots militares
- 6.5 Robots de minería
- 6.6 Cuidado de la salud
- 6.6.1 Automatización del hogar para los ancianos y discapacitados
- 6.6.2 Farmacias
- 6.7 Robots de investigación
- 6.7.1 Nanorobots
- 6.7.2 Robots reconfigurables
- 6.7.3 Robots suaves
- 6.7.4 Enjambre de robots
- 6.7.5 Robots interface haptica
- 6.8 Entretenimiento
- 7 Desarrollo futuro
- 7.1 Tendencias tecnológicas
- 7.2 Desarrollo tecnológico
- 7.2.1 Tendencias generales
- 7.2.2 Capacidades y nuevas funciones
- 7.3 Robot de lectura
- 8 Robots en la cultura popular
- 8.1 Literatura
- 8.2 Problemas representados en la cultura popular
- 9 Véase también
- 10 Referencias
- 11 Lectura adicional
- 12 Enlaces externos
Resumen


La palabra robot puede referirse a ambos robots físicos y virtual agentes de software, pero estos últimos se refieren generalmente como bots.[6] No existe consenso en que las máquinas califican como robots pero no hay acuerdo general entre los expertos y el público, que los robots tienden a hacer algunos o todos de los siguientes: moverse, operar una extremidad mecánica, sentido y manipular su entorno y mostrar un comportamiento inteligente — sobre todo comportamiento que imita a los seres humanos u otros animales. En términos prácticos, "robot" generalmente se refiere a una máquina que puede programarse electrónicamente para llevar a cabo una variedad de tareas físicas o acciones.
No existe una definición de robot que satisfaga a todo el mundo y muchas personas tienen sus propios.[7] Por ejemplo Joseph Engelberger, una empresa pionera en robótica industrial, comentó una vez: "no puedo definir un robot, pero reconozco uno cuando lo veo".[8] Las dos formas en que los robots difieren de real seres son, en pocas palabras, en el dominio de cognicióny en el dominio de forma biológica. El consenso general es que un "robot" es una máquina y no ser simplemente porque no es inteligente (requiere programación a función), independientemente de lo humano-como puede parecer. En contraste, un imaginario "máquina" o "forma de vida artificial"(como en ciencia ficción) podía pensar cerca o por encima inteligencia humanay tenía un cuerpo sensorialYa no sería un "robot" pero sería una especie de "ser artificial" o "robot cognitivo", (véase también Cyborg).
Según el Encyclopaedia Britannica, un robot es "cualquier máquina operada automáticamente que reemplaza el esfuerzo humano, aunque no se asemejan a los seres humanos en apariencia o puede realizar las funciones de una manera parecida a la humana". Merriam-Webster un robot se describe como "una máquina que se parece a un ser humano y realiza varios actos complejos (como caminar o hablar) de un ser humano" o un "dispositivo que realiza las tareas complicadas a menudo repetitivas," o un "mecanismo de guiado por controles automáticos".[9]
Historia
La idea de los autómatas se origina en las mitologías de muchas culturas alrededor del mundo. Ingenieros e inventores de las civilizaciones antiguas, incluyendo China antigua,[10] La Grecia antigua, y Egipto ptolemaico,[11] ha intentado construir máquinas Self-funcionamiento, algunos que se asemejan a animales y seres humanos. Las descripciones tempranas de autómatas incluyen las palomas artificiales de Archytas,[12] las aves artificiales de Mozi y Lu Ban,[13] un autómata "hablando" por Héroe de Alejandría, un autómata de lavabo por Philo de Bizancio, y un autómata humano descrito en el Mentira Zi.[10]
Inicios
Muchas mitologías antiguas y las religiones más modernas incluyen gente artificial, como los siervos mecánicos construidos por el Dios griego Hefesto[14] (Vulcano a los romanos), la arcilla Golems de judío gigantes leyenda y arcilla de la leyenda nórdica, y Galatea, la estatua del mítica Pigmalión Eso vino a la vida. Desde entonces hacia el año 400 A.C., mitos de Creta incluyen Talos, un hombre de bronce que custodiaban la isla Creta de Europa de los piratas.

En la antigua Grecia, el ingeniero griego Ctesibio (c. 270 A.C.) "aplicado a un conocimiento de la neumática e hidráulica para producir el primer órgano y relojes de agua con figuras en movimiento".[15][16] En el siglo IV A.C., el Griego matemático Archytas de Tarento postula un pájaro mecánico funciona con vapor que llamó "La paloma". Héroe de Alejandría (10-70 D.C.), un matemático griego e inventor, creó numerosos dispositivos automáticos configurables por el usuario y describió las máquinas accionadas por presión de aire, vapor y agua.[17]
El Lokapannatti del siglo XI narra cómo las reliquias del Buda fueron protegidas por robots mecánicos (bhuta Vájana yanta), desde el visaya Unido de Roma (Roma); hasta que fueron desarmados por rey Ashoka. [18] [19]
En la antigua China, el texto del siglo III de la Mentira Zi describe un relato de autómatas humanoides, que implican un encuentro mucho antes entre el emperador chino Rey Mu de Zhou y un ingeniero mecánico conocido como Yan Shi, un 'artesano'. Yan Shi orgullosamente presenta al rey con una figura de tamaño natural, con forma humana de su mecánica 'obra' hecha de cuero, madera y órganos artificiales.[10] También hay relatos de vuelo autómatas en el Han Fei Zi y otros textos, que atribuye el siglo v A.C. Mohist filósofo Mozi y su contemporáneo Lu Ban con la invención de pájaros de madera artificial (yuan ma) que podía volar con éxito.[13] En 1066, el inventor chino Su canción construyó un reloj de agua en la forma de una torre que contó con figuras mecánicas que repicaron las horas.

El principio de los autómatas se asocia con la invención de figuras mecánicas de temprano Su Song Torre del reloj astronómico destacado que repicaron las horas.[20][21][22] Su mecanismo tenía una máquina programable del tambor con las clavijas (Cams) que tropecé con poco palancas Eso funcionó instrumentos de percusión. El baterista se pudo jugar diferentes ritmos y tambor diferentes patrones moviendo las clavijas a diferentes lugares.[22]
En Renacimiento Italia Leonardo da Vinci (1452-1519) esbozado planes para un robot humanoide alrededor 1495. Cuadernos de da Vinci, redescubiertos en la década de 1950, contienen dibujos detallados de un caballero mecánico ahora conocido como Robot de Leonardo, capaz de sentarse, mueve sus brazos y mover su cabeza y mandíbula.[23] El diseño fue basado probablemente en investigaciones anatómicas grabadas en su Hombre de Vitruvio. No se sabe si intentó construirlo.
En Japón, complejos autómatas animales y humanos fueron construidos entre los siglos XVII al XIX, con muchos descrita en el siglo XVIII Karakuri zui (Maquinaria ilustrada1796). Un tal autómata fue el Karakuri ningyō, un mecanizado marioneta.[24] Diferentes variaciones de los karakuri existieron: el Karakuri Butai, que fueron utilizados en Teatro, la Zashiki karakuri, que eran pequeños y usados en los hogares y el Dashi karakuri que fueron utilizadas en las fiestas religiosas, donde las marionetas fueron utilizadas para llevar a cabo representaciones de tradicional mitos y leyendas.
En Francia, entre 1738 y 1739, Jacques de Vaucanson exhibió varios autómatas tamaño real: un flautista, un tubo y un pato. El pato mecánico podría batir sus alas, el cuello de la grúa y tragar alimentos de mano del expositor, y dio la ilusión de digerir su comida excretando materia almacenada en un compartimento oculto.[25]
Sistemas de control remoto
Vehículos operados remotamente fueron demostrados en el siglo XIX bajo la forma de varios tipos de control remoto Torpedoes. Los primeros años 1870 vieron controlado remotamente Torpedoes por John Ericsson (neumática), John Louis Lay (alambre eléctrico guiado), y Victor von Scheliha (alambre eléctrico guiado).[26]
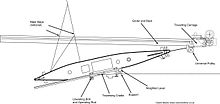
El Torpedo Brennan, inventado por Louis Brennan en 1877 fue impulsado por dos hélices contra-rotación que fueron hecho girar rápidamente tirando hacia fuera los alambres de los tambores de la herida dentro de la torpedo. Velocidad diferenciada en los cables conectados a la estación costera permitió el torpedo guiar a su objetivo, por lo que es "el primero en el mundo práctico misil guiado".[27] En 1897, el inventor británico Ernest Wilson se concedió una patente para un torpedo controlado remotamente por las ondas "Hertzianas" (radio)[28][29] y en 1898 Nikola Tesla demostrado públicamente un radio-controlado torpedo que esperaba vender a la Marina de los EEUU.[30][31]
Archibald Low, conocido como el "padre de los sistemas de orientación radio" por su trabajo pionero sobre guiada por los cohetes y aviones durante el Primera guerra mundial. En 1917, él demostró una aeronave controlada remota para el Royal Flying Corps y en el mismo año construyó el primer cohete guiado por cable.
Robots humanoides
El término 'robot' fue utilizado primero para denotar autómatas ficticios en una obra de 1921 R.U.R. Robots universales de Rossum por la Checo escritor, Karel Čapek.

En 1928, uno de los primeros robots humanoides fue exhibida en la feria anual de la sociedad de ingenieros de modelo en Londres. Inventado por W. H. Richards, marco de Eric el robot constaba de un aluminio cuerpo de armadura con once Electroimanes y un motor accionado por una fuente de alimentación de 12 voltios. El robot puede mover sus manos y la cabeza y puede ser controlado a través de control remoto o control de voz.[32]
Westinghouse Electric Corporation Televox construido en 1926; era un recorte de cartón conectado a varios dispositivos que los usuarios pueden activar y desactivar. En 1939, el robot humanoide conocido como Elektro fue debutó en el Feria Mundial.[33][34] Siete pies (2,1 m) de altura y pesa 265 libras (120,2 kg), podría caminar por comando de voz, cerca de 700 palabras (usando un 78 rpm tocadiscos), fuman cigarrillos, inflar globos, y mover su cabeza y brazos. El cuerpo consistió en un engranaje de acero, cam y motor esqueleto cubierto por una piel de aluminio. En 1928, primer robot de Japón, Gakutensoku, fue diseñada y construida por el biólogo Makoto Nishimura.
Modernos robots autónomos
Los primeros robots autónomos electrónicos con comportamiento complejo fueron creados por William Grey Walter de la Instituto neurológico de carga en Bristol, Inglaterra en 1948 y 1949. Quería probar que rico las conexiones entre un pequeño número de células del cerebro podría dar lugar a muy complejo comportamientos -esencialmente que el secreto de cómo funcionaba el cerebro pone en lo fue conectado. Sus primeros robots, llamados Elmer y Elsie, se construyeron entre 1948 y 1949 y se describe a menudo como tortugas debido a su forma y ritmo lento del movimiento. Los robots tortuga tres ruedas eran capaces de Fototaxia, en que encontraron su camino a una recarga de estación cuando corrieron bajos en energía de la batería.
Walter destacó la importancia del uso puramente analógico electrónica simular los procesos del cerebro en un momento cuando sus contemporáneos tales como Alan Turing y John von Neumann todos giraban hacia una visión de los procesos mentales en términos de digital cómputo. Su trabajo inspiró a generaciones posteriores de robótica investigadores tales como Rodney Brooks, Hans Moravec y Mark Tilden. Modernas encarnaciones de Walter tortugas pueden encontrarse en la forma de Robótica BEAM.[35]

El robot primero digitalmente operado y programable fue inventado por George Devol en 1954 y en última instancia, fue llamado el Unimate. En última instancia, esto sentó las bases de la industria de la robótica moderna.[36] Devol vendió el primer Unimate a General Motors en 1960, y fue instalado en 1961 en una planta en Trenton, Nueva Jersey para levantar piezas calientes de metal de un fundición a presión la máquina y apilarlos.[37] Patente de Devol para el primer brazo robótico programable digital operado representa la Fundación de la industria de la robótica moderna.[38]
El primero robot paletizador fue introducido en 1963 por la empresa Fuji Yusoki Kogyo.[39] En 1973, fue patentado un robot con seis ejes impulsados electromecánico [40][41] por Robótica KUKA en Alemania y el brazo de manipulación universal programable fue inventado por Victor Scheinman en 1976, y el diseño fue vendido a Unimation.
Los robots comerciales e industriales están en uso generalizado realizar trabajos más barato o con mayor precisión y confiabilidad que los seres humanos. También se emplean para trabajos que son demasiado sucios, peligrosos o aburrida ser convenientes para los seres humanos. Los robots son ampliamente utilizados en la fabricación, montaje y embalaje, transporte, exploración de la tierra y el espacio, cirugía, armamento, investigación de laboratorio y producción masiva de bienes de consumo e industriales.[42]
Etimología

La palabra robot fue presentado al público por la Checo entreguerras escritor Karel Čapek en su obra R.U.R. (Robots universales de Rossum), publicado en 1920.[43] La obra comienza en una fábrica que utiliza un sustituto químico del protoplasma para fabricar gente viva y simplificada llamada robots. La obra no se centra en detalle en la tecnología detrás de la creación de estas criaturas, pero en su apariencia prefiguran las ideas modernas de androides, criaturas que pueden confundirse con los seres humanos. Estos trabajadores de producción en masa son descritos como eficiente pero sin emociones, incapaz de pensar original e indiferente al instinto de conservación. La cuestión es si los robots están siendo explotados y las consecuencias de la dependencia humana mercantilizada laboral (especialmente después de una serie de robots especialmente-forumlated logra auto-conciencia e incita a los robots de todo el mundo a levantarse en contra de los seres humanos).
Karel Čapek moneda no la palabra. Él escribió una breve carta en referencia a un Etimología En Oxford English Dictionary en que se nombró a su hermano, el pintor y escritor Josef Čapek, como su creador real.[43]
En un artículo publicado en el diario Checo Lidové noviny en 1933, explicó que originalmente quería llamar a las criaturas laboři ("trabajadores", de Latina mano de obra). Sin embargo, él no le gustaba la palabra y buscó el Consejo de su hermano José, quien sugirió "tragamonedas". La palabra robota significa literalmente"Corvea","trabajo de siervo"y en sentido figurado"monotonía"o"trabajo duro"en Checo y también (más general) "trabajar", "mano de obra" en muchos Lenguas eslavas (por ejemplo: Búlgaro, Ruso, Serbio, Eslovaco, Polaco, Macedonio, Ucraniano, arcaico Checo). Tradicionalmente el robota fue el período de trabajo un siervo (Corvea) tuvo que dar para su señor, típicamente 6 meses del año. El origen de la palabra es el Antiguo eslavo eclesiástico (Antiguo búlgaro) rabota "servidumbre" ("trabajo" en contemporáneo Búlgaro y Ruso), que a su vez proviene de la Protoindoeuropeo raíz * orbh-. Robot es cognado con la raíz alemana Arbeit (trabajo).[44][45]
La palabra robótica, usado para describir este campo de estudio,[2] fue acuñado por el escritor de ciencia ficción Isaac Asimov. Asimov creó el "Tres leyes de la robótica"que es un tema recurrente en sus libros. Estos han puesto utilizados por muchos otros para definir leyes utilizadas en realidad y la ficción.
Robots modernos

Robot móvil
Robots móviles [46] tienen la capacidad de moverse en su entorno y no se fija a una localización física. Un ejemplo de un robot móvil que es común en uso hoy en día es la vehículo guiado automatizado o vehículos guiado automático (AGV). Un AGV es un robot móvil que sigue marcadores de cables en el piso o utiliza visión o láser.[citación necesitada] AGV se discute más adelante en este artículo.
Robots móviles también se encuentran en los entornos industrial, militar y de seguridad. También aparecen como productos de consumo, entretenimiento o para realizar ciertas tareas como limpieza por aspiración. Robots móviles son el foco de una gran cantidad de investigación actual y casi todos los principal Universidad tiene uno o más laboratorios que se centran en la investigación de robot móvil.[citación necesitada]
Robots móviles se utilizan generalmente en ambientes fuertemente controlados tales como en líneas de montaje porque tienen dificultad para responder a la interferencia inesperada. Debido a esto la mayoría de los seres humanos raramente encuentran robots. Sin embargo robots domésticos para la limpieza y mantenimiento son cada vez más comunes en los alrededores de las viviendas en los países desarrollados. Los robots también pueden encontrarse en militar aplicaciones.[citación necesitada]
Robots industriales (manipulación)

Robots industriales consisten en generalmente un brazo articulado (manipulador de múltiples vinculado) y un efector final se une a una superficie fija. Uno de los tipos más comunes de efector final es un pinza Asamblea.
El International Organization for Standardization da una definición de un robot manipulador industrial en ISO 8373:
"un automáticamente controlado, reprogramable, polivalente, manipulador programable en tres o más ejes, los cuales pueden ser fijas en su lugar o móviles para uso en aplicaciones de automatización industrial."[47]
Esta definición es utilizada por el Federación Internacional de robótica, la Europea de robótica red (EURON) y muchos comités de estándares nacionales.[48]
Robot de servicio
Comúnmente robots industriales son fijos brazos robóticos y manipuladores utilizados principalmente para la producción y distribución de mercancías. El término "robot de servicio" es menos bien definido. El Federación Internacional de robótica ha propuesto una definición provisional, "un robot de servicio es un robot que opera semi o totalmente autónomo para realizar servicios útiles para el bienestar de los seres humanos y equipos, excluyendo las operaciones de fabricación."[49]
Robot educativo
Los robots son utilizados como asistentes educativos para los maestros. Desde la década de 1980, los robots como tortugas fueron utilizados en las escuelas y programar usando el Logotipo idioma.[50][51]
Hay kits de robot como LEGO Mindstorms, BIOLOIDOLLO de ROBOTIS, o Robots educativos BotBrain puede ayudar a los niños a aprender sobre matemáticas, física, programación y electrónica. También se han introducido en las vidas de los estudiantes de primaria y secundaria en forma de robótica competiciones de robot con la empresa PRIMERO (Para la inspiración y el reconocimiento de la ciencia y la tecnología). La organización es la base para el Concurso de Robótica FIRST, FIRST LEGO League, Junior FIRST LEGO League, y PRIMER desafío Tech competiciones.
También ha habido dispositivos en forma de robots como el equipo de enseñanza, Leachim (1974), y 2-XL (1976), un robot con forma de juguete juego / enseñanza basado en un cinta de 8 pistas jugador, ambos inventado Michael J. Freeman.
Robot modular
Robots modulares son una nueva raza de robots que están diseñados para aumentar la utilización de robots de modularización de su arquitectura.[52] La funcionalidad y la eficacia de un robot modular es más fácil aumentar en comparación con los robots convencionales. Estos robots se componen de un solo tipo de idéntico, varios tipos de diferentes módulos idénticos, o igualmente en forma de módulos, que varían en tamaño. Su estructura arquitectónica permite hiper-redundancia para robots modulares, como se los puede diseñar con más de 8 grados de libertad (DOF). Creación de la programación, inversa cinemática y dinámica de robots modulares es más complejo que con robots tradicionales. Los robots modulares pueden estar compuestos de los módulos en forma de L, módulos cúbicos y tú y módulos en forma de H. Tecnología de ANAT, una temprana tecnología robótica modular patentada por robótica Design Inc., permite la creación de robots modulares y H en forma de módulos que se conectan en una cadena y se utilizan para formar sistemas homogéneos y heterogéneos robot modular. Estos "robots ANAT" se pueden diseñar con "n" DOF cada módulo es un completo sistema robótico motorizado que pliegues relativamente a los módulos conectados antes y después de él en su cadena, y por lo tanto un único módulo permite un grado de libertad. Los módulos más que están conectados uno al otro, los más grados de libertad que tendrá. Módulos en forma de L también pueden ser diseñados en una cadena y deben hacerse cada vez más pequeños como el tamaño de los aumentos de la cadena, como cargas atados al extremo de la cadena de lugar a una mayor tensión en los módulos que están más lejos de la base. Módulos en forma de H ANAT no sufren de este problema, ya que su diseño permite un robot modular distribuir la presión e impactos uniformemente entre otros módulos conectados, y por lo tanto, capacidad de carga útil no disminuye a medida que la longitud del brazo aumenta. Robots modulares pueden ser manual o automática reconfigurada para formar un robot diferente, puede llevar a cabo diferentes aplicaciones. Porque los robots modulares del mismo tipo de arquitectura se componen de módulos que lo componen diferentes robots modulares, un serpiente-brazo robot se puede combinar con otra para formar una doble o quadra-brazo robot, o puede dividir en varios robots móviles y robots móviles pueden dividir en varios más pequeños, o combinar con otros en una versión más grande o diferente. Esto permite que un solo robot modular la capacidad de ser totalmente especializada en una sola tarea, así como la capacidad de ser especializadas para realizar múltiples tareas diferentes.
Tecnología robótica modular se está aplicando actualmente en el transporte de híbrido,[53] automatización industrial,[54] limpieza de conductos[55] y manejo. Muchos centros de investigación y universidades han estudiado también esta tecnología y han desarrollado prototipos.
Robots colaborativos
A robot colaborativo o COBOT es un robot que puede interactuar con seguridad y eficacia con trabajadores humanos mientras realiza tareas industriales simples. Sin embargo, efectores y otras condiciones ambientales pueden crear peligros, y como tal deben realizarse evaluaciones de riesgo antes de utilizar cualquier aplicación de control de movimiento industrial.[56]
Los robots colaborativos más ampliamente utilizados en las industrias de hoy son fabricados por Universales Robots en Dinamarca.[citación necesitada]
Repensar robótica — fundado por Rodney Brooks, previamente con iRobot— introducido Baxter en septiembre de 2012; como un robot industrial diseñado para seguridad interactuar con vecinos trabajadores humanos y ser programable para realizar tareas simples.[57] Baxter deja si detectan a un ser humano en el camino de sus brazos robóticos y tienen prominentes interruptores. Destinados a la venta a las pequeñas empresas, son promovidos como el robótico análogo del ordenador personal.[58] A partir de mayo de 2014[actualización]190 compañías en los Estados Unidos han comprado a Baxter y se están utilizando comercialmente en el Reino Unido.[5]
Robots en la sociedad

Aproximadamente la mitad de todos los robots en el mundo están en Asia, 32% en Europa y 16% en América del norte, en el 1% Australasia y el 1% en África.[61] 40% de todos los robots en el mundo están en Japón,[62] convierte en Japón el país con el mayor número de robots.
Autonomía y cuestiones éticas

Como los robots han vuelto más sofisticados y avanzados, expertos y académicos han explorado cada vez más las preguntas de qué ética podría gobernar el comportamiento de los robots,[64] y si los robots podrían reclamar ningún tipo de derechos sociales, culturales, éticos o legales.[65] Un equipo científico ha dicho que es posible que exista un cerebro robot en 2019.[66] Otros predicen los avances de inteligencia robot para el año 2050.[67] Los avances recientes han hecho comportamiento robótico más sofisticados.[68] El impacto social de robots inteligentes es tema de un documental de 2010 llamado Enchufe y orar.[69]
Vernor Vinge ha sugerido que puede venir un momento cuando Computadoras y robots son más inteligentes que los seres humanos. Llama a esto"la singularidad".[70] Sugiere que puede ser algo o posiblemente muy peligroso para los seres humanos.[71] Esto es discutido por una filosofía llamada Singularitarianism.
En 2009, expertos asistieron a una conferencia organizada por el Asociación para el progreso de la Inteligencia Artificial (AAAI) para debatir sobre si sería capaces de adquirir cualquier autonomía ordenadores y robots, y cuánto estas habilidades podrían suponer una amenaza o peligro. Señalaron que algunos robots han adquirido diversas formas de semiautonomía, incluyendo ser capaz de encontrar fuentes de energía por su propia cuenta y ser capaz de elegir independientemente blancos a atacar con armas. También señalaron que algunos virus informáticos puede evadir la eliminación y han logrado "inteligencia de cucaracha". Señalaron que conciencia de sí mismo como se muestra en la ciencia ficción es probablemente improbable, pero que había otros posibles peligros y trampas.[70] Varios medios de comunicación y grupos de científicos han observado tendencias separadas en diferentes áreas que podría juntos resultan en mayores funcionalidades robóticas y autonomía, y que plantean algunas preocupaciones inherentes.[72][73][74]
Robots militares
Algunos expertos y académicos han cuestionado el uso de robots de combate militar, especialmente cuando estos robots reciben algún grado de funciones autónomas.[75] También existen preocupaciones acerca de la tecnología que podría permitir que algunos robots armados ser controlada principalmente por otros robots.[76] La Marina de Estados Unidos ha financiado un informe que indica que, como robots militares llegan a ser más complejas, debe haber una mayor atención a las implicaciones de su capacidad de tomar decisiones autónomas.[77][78] Un investigador afirma que robots autónomos podrían ser más humanos, como podrían hacer decisiones más eficazmente. Sin embargo, otros expertos cuestionan esto.[79]
Un robot en particular, la CREADORA, ha generado la preocupación de las [80] sobre la fuente de su combustible, ya que continuamente repostar, escogiendo las sustancias orgánicas.[81] Aunque el motor para la creadora está diseñado para ejecutarse biomasa y la vegetación[82] específicamente seleccionados por sus sensores, que puede encontrar en los campos de batalla o en otros entornos locales, el proyecto ha declarado que también puede utilizarse grasa de pollo.[83]
Manuel De Landa ha señalado que "misiles inteligentes" y las bombas autónomas dotadas de percepción artificial pueden ser consideradas robots, como hacen algunas de sus decisiones de manera autónoma. Él cree que esto representa una tendencia importante y peligrosa en el cual los seres humanos están entregando las decisiones importantes a las máquinas.[84]
Relación con el desempleo
Un ejemplo reciente de reemplazo humano consiste en compañía de tecnología taiwanesa Foxconn que, en julio de 2011, anunció un plan de tres años para sustituir a trabajadores con más robots. En la actualidad la empresa utiliza robots 10 mil pero incrementará a 1 millón de robots durante un período de tres años.[85]
Los robots de servicio de diferentes variedades, incluyendo médicos robots, robots submarinos, robots de vigilancia, los robots de demolición y otros tipos de robots que realizan multitud de puestos de trabajo están ganando en números. Robots de servicio son herramientas cotidianas para la humanidad. Puede limpiar pisos, cortar el césped y protector de casas y también ayudar a las personas de edad y discapacitados, hacer algunas cirugías, inspeccionar las tuberías y sitios que son peligrosos para la gente, combatir los incendios y desactivar bombas.[86]
Usos contemporáneos

En la actualidad, existen dos tipos principales de robots, basados en su uso: propósito generales robots autónomos y los robots dedicados.
Los robots se pueden clasificar según su especificidad de propósito. Un robot puede ser diseñado para realizar una tarea extremadamente bien, o una serie de tareas menos bien. Por supuesto, todos los robots por su naturaleza pueden programarse nuevamente a comportarse de forma diferente, pero algunos están limitados por su forma física. Por ejemplo, un brazo de robot de fábrica puede realizar trabajos tales como corte, soldadura, encolado o actúa como un paseo en Parque de atracciones, mientras que un robot pick-and-place sólo puede rellenar tarjetas de circuitos impresos.
Propósito generales robots autónomos
Propósito generales robots autónomos independientemente pueden realizar una variedad de funciones. Propósito generales robots autónomos típicamente pueden navegar independientemente en espacios conocidos, manejar sus propias necesidades vuelve a la carga, interfaz con puertas electrónicas y ascensores y realizar otras tareas básicas. Como computadoras, robots de propósito generales pueden enlazar con las redes, software y accesorios que aumentan su utilidad. Puede reconocer a personas u objetos, hablar, proporcionar compañía, supervisar la calidad del medio ambiente, responden a alarmas, recoger suministros y realizar otras tareas útiles. Los robots de propósito generales pueden realizar simultáneamente una variedad de funciones o puede tomar en diferentes roles en diferentes momentos del día. Estos robots intentan imitar a los seres humanos y ni siquiera pueden asemejarse a la gente en apariencia; Este tipo de robot se llama un robot humanoide. Robots humanoides están todavía en una etapa muy limitada, como ningún robot humanoide puede, hasta el momento, de hecho desplazarse alrededor de un cuarto que nunca ha estado en.[citación necesitada] Así, los robots humanoides son bastante limitados, a pesar de sus comportamientos inteligentes en sus entornos conocidos.
Robots de fábrica
Producción de autos
En las últimas tres décadas, fábricas de automóviles han convertido dominado por robots. Una típica fábrica contiene cientos de robots industriales trabajando en líneas de producción totalmente automatizadas, con un robot por cada diez trabajadores humanos. En una línea de producción automatizada, es un chasis de vehículo sobre una cinta transportadora soldado con autógena, pegados, pintado y finalmente se reunieron en una secuencia de las estaciones de robot.
Embalaje
Robots industriales también se utilizan extensivamente para paletizado y embalaje de los productos manufacturados, por ejemplo para rápidamente tomando trago cartones desde el extremo de una cinta transportadora y colocarlos en cajas, o para carga y descarga de centros de mecanizado.
Electrónica
Producido en masa placas de circuito impreso (PCB) son casi exclusivamente fabricados por robots pick-and-place, típicamente con SCARA manipuladores, que eliminan pequeñas componentes electrónicos de las tiras o bandejas y colocarlos a PCB con gran precisión.[87] Estos robots pueden colocar cientos de miles de componentes por hora, superando hasta un ser humano en velocidad, precisión y fiabilidad.[88]
Vehículos guiados automatizados (AGVs)

Robots móviles, siguiendo los marcadores o cables en el piso o el uso de visión[89] o láser, se utilizan para el transporte de mercancías en grandes instalaciones, tales como almacenes, puertos de contenedores o los hospitales.[90]
Primeros robots AGV-estilo
Limitarse a tareas que podrían ser definidas con precisión y tuvo que ser realizada el mismo cada cierto tiempo. Muy poca retroalimentación o inteligencia fue requerido, y los robots necesitan solamente lo más básico exteroceptores (sensores). Las limitaciones de estos AGV son que sus caminos no se alteran fácilmente y no pueden alterar sus rutas si obstáculos bloquean. Si se rompe un AGV, puede terminar toda la operación.
Tecnologías AGV provisionales
Desarrollado para desplegar la triangulación de balizas o rejillas de código de barras para la exploración en el piso o el techo. En la mayoría de las fábricas, sistemas de triangulación tienden a requerir mantenimiento moderado a alta, tales como la limpieza diaria de todas las balizas o códigos de barras. También, si una plataforma alta o vehículo grande bloquea balizas o un código de barras está estropeado, AGV puede ser perdido. A menudo tal AGV está diseñado para ser utilizados en ambientes libres de humanos.
AGV inteligente (i-AGVs)
Como SmartLoader,[91] SpeciMinder,[92] ADAM,[93] Remolcador[94] Eskorta,[95] y 400 MT con Motivity[96] están diseñadas para espacios de trabajo respetuoso con la gente. Navegan por reconocer las características naturales. Escáneres 3D u otros medios de teleobservación del medio ambiente en dos o tres dimensiones ayuda a eliminar acumulativa errores en cómputo muerto cálculos de la posición actual de los AGV. Algunos AGV puede crear mapas de su entorno mediante escaneo láser con Mapeo y localización simultánea (SLAM) y los mapas para navegar en tiempo real con otros algoritmos de evitación de planificación y obstáculo de camino. Son capaces de operar en entornos complejos y realizar tareas no son repetitivos y no secuencial como transporte patrones en un laboratorio de semiconductores, las muestras en los hospitales y las mercancías en los almacenes. Para los sectores dinámicos, almacenes llenos de paletas, AGV requiere estrategias adicionales usando sensores tridimensionales tales como cámaras de tiempo de vuelo o estereovisión.
Tareas sucias, peligrosas, aburridas o inaccesibles
Hay muchos trabajos que los seres humanos más bien dejaría a los robots. El trabajo puede ser aburrido, tales como la limpieza doméstica, o peligrosas, como explorar dentro de un Volcán.[97] Otros trabajos son físicamente inaccesibles, como explorar otro planeta,[98] limpiar el interior de un tubo largo, o realizar laparoscópica cirugía.[99]
Sondas espaciales
Casi todos los no tripulados sonda espacial lanzado nunca era un robot.[100][101] Algunos fueron lanzados en la década de 1960 con capacidades muy limitadas, pero su capacidad de volar y de la tierra (en el caso de Luna 9) es una indicación de su estatus como un robot. Esto incluye la Sondas Voyager la sonda Galileo y otros.
Telerobots

Robots teleoperados, o telerobots, son dispositivos operado remotamente a distancia por un operador humano en lugar siguiendo una secuencia predeterminada de movimientos, pero que tiene comportamiento semiautónomo. Se utilizan cuando un ser humano no puede ser presente en el sitio para realizar un trabajo porque es peligroso, muy lejos, o inaccesibles. El robot puede ser en otra habitación o en otro país, o puede ser en una escala muy diferente al operador. Por ejemplo, un robot de cirugía laparoscópica permite al cirujano trabajar dentro de un paciente humano en una escala relativamente pequeña en comparación con la cirugía, acortando considerablemente el tiempo de recuperación abierta.[99] También pueden utilizarse para evitar exponer a los trabajadores a los espacios apretados y peligrosos tales como en conducto limpieza. Al desactivar una bomba, el operador envía un pequeño robot para desactivarlo. Varios autores han estado usando un dispositivo llamado el Longpen para firmar libros remotamente.[102] Aviones robot teleoperados, como el depredador Vehículo aéreo no tripulado, cada vez más están siendo utilizados por los militares. Estos aviones sin piloto pueden buscar terreno y disparar a objetivos.[103][104] Cientos de robots como iRobotes PackBot y el Foster-Miller TALON se utilizan en Irak y Afganistán por la Militares de los E.E.U.U. desactivar bombas en la carretera o dispositivos explosivos improvisados (IEDs) en una actividad conocida como eliminación de artefactos explosivos (EOD).[105]
Fruta automatizado Segadoras
Se utilizan robots que automatizar la recogida de fruta en huertos a un costo más bajo que el de recolectores de humanos.
Robots domésticos

Robots domésticos son simples robots dedicados a un sola tarea de trabajo en uso en el hogar. Son utilizados en trabajos simples pero no deseados, tales como limpieza del vacío, lavado del piso, y segar el césped.
Robots militares
Robots militares incluyen el Robot de espadas que se utiliza actualmente en combate terrestre. Puede utilizar una variedad de armas y hay algunos debates de darle cierto grado de autonomía en situaciones de campo de batalla.[106][107][108]
Vehículos aéreos de combate no tripulados (UCAVs), que son una forma mejorada de Vehículos aéreos no tripulados, puede hacer una gran variedad de misiones, incluyendo el combate. UCAVs están siendo diseñados como el BAE Systems Mantis que tendría la capacidad de volar a sí mismos, a buscar su propio rumbo y destino y para tomar decisiones más por su propia cuenta.[109] El BAE Taranis es un UCAV construido por Gran Bretaña que puede volar sin piloto continentes y dispone de nuevos medios para evitar la detección.[110] Los ensayos de vuelo se esperan comenzar en 2011.[111][112]
El AAAI se ha estudiado este tema en profundidad[64] y su Presidente ha encargado un estudio para examinar esta cuestión.[113]
Algunos han sugerido la necesidad de construir"AI amistoso", lo que significa que los avances que ya se están produciendo con AI también deben incluir un esfuerzo para hacer AI intrínsecamente amable y humano.[114] Varias medidas al parecer ya existen, con robot-pesado países como Japón y Corea del sur[115] habiendo comenzado a pasar las regulaciones que requieren robots para equiparse con sistemas de seguridad y posiblemente sistemas de 'leyes' similar a la de Asimov Tres leyes de la robótica.[116][117] Un informe oficial fue emitido en 2009 por el Comité de política del gobierno japonés Robot industrial.[118] Investigadores y funcionarios chinos han emitido un informe que sugiere un conjunto de normas éticas, y un conjunto de nuevas directrices legales se refiere como "Robot estudios jurídicos".[119] Se ha expresado cierta preocupación sobre una posible ocurrencia de robots diciendo falsedades evidentes.[120]
Robots de minería
Los robots mineros están diseñados para resolver una serie de problemas que enfrenta actualmente la industria minera, incluyendo la escasez de habilidades, mejorar la productividad disminuyendo los grados de mineral, y alcanzar los objetivos ambientales. Debido a la naturaleza peligrosa de la explotación minera, en particular minería subterránea, la prevalencia de robots autónomas, semi-autónomas y tele-operado ha aumentado considerablemente en los últimos tiempos. Una serie de fabricantes de vehículos proporcionan autónomos trenes, camiones y cargadores se cargar el material, el transporte en el sitio de la mina a su destino y descargar sin necesidad de intervención humana. Una de las empresas mineras más grandes del mundo, Rio Tinto, recientemente ha ampliado su flota de vehículos autónomos para la mayor del mundo, que consta de 150 autónoma Komatsu camiones, operando en Australia occidental.[121]
Perforación, longwall y rockbreaking las máquinas están disponibles ahora también como robots autónomos.[122] El Atlas Copco Sistema de Control de plataforma autónoma puede ejecutar un plan de perforación en un plataforma de perforación, mueve la plataforma en posición usando el GPS, configurar el taladro de perforación y perforar hasta la profundidad especificada.[123] Del mismo modo, la Transmin Rocklogic sistema automáticamente puede planear una ruta para colocar un Faded a un destino seleccionado.[124] Estos sistemas mejoran grandemente la seguridad y eficiencia de las operaciones mineras.
Cuidado de la salud
Los robots en la asistencia sanitaria tienen dos funciones principales. Los que ayudan a un individuo, como una víctima de una enfermedad como la esclerosis múltiple y los que ayudan en los sistemas generales tales como hospitales y farmacias.
Automatización del hogar para los ancianos y discapacitados
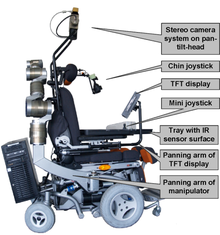
Robots utilizados en automatización del hogar han desarrollado con el tiempo desde simples asistentes robóticos básicas, tales como la Práctico 1,[125] a través de robots semi autónomos, tales como AMIGO lo que puede ayudar a los ancianos y discapacitados con tareas comunes.
La población es envejecimiento en muchos países, especialmente Japón, lo que significa que hay un número creciente de personas mayores para cuidar, pero relativamente menos jóvenes para cuidar de ellos.[126][127] Los seres humanos hacen los mejores cuidadores, pero donde están disponibles, los robots son gradualmente introduciendo.[128]
AMIGO es un robot semiautónomo diseñado para soportar deshabilitado y ancianos gente en sus actividades cotidianas, como preparando y sirviendo una comida. AMIGO hacen posible que pacientes ¿Quiénes son parapléjico, tienen enfermedades musculares o grave parálisis (debido a accidentes cerebrovasculares etc.), para realizar tareas sin ayuda de otras personas como terapeutas o personal de enfermería.
Farmacias
|
|
En esta sección No lo hace Cite cualquier referencias o fuentes. (Julio de 2009) |
La escritura de fabrica Pro un robot diseñado para ayudar a las farmacias llenar las recetas que consisten en sólidos orales o medicamentos en forma de pastilla. El farmacéutico o técnico de farmacia entra la información de prescripción en su sistema de información. El sistema, al determinar si la droga es en el robot, o no enviará la información al robot para el relleno. El robot tiene 3 frascos de diverso tamaño para llenar determinado por el tamaño de la píldora. El técnico de robot, usuario o a su farmacéutico determina el tamaño necesario del vial basado en la tableta cuando el robot está equipado. Una vez que el frasco se llenó se trajo a una cinta transportadora que lo entrega a un soporte que hace girar el frasco y se fija la etiqueta del paciente. Luego se encuentra otro transportador que entrega frasco de medicación del paciente a una ranura marcada con el nombre del paciente en un LED de lectura. El farmacéutico o técnico entonces comprueba el contenido del vial para garantizar que es el medicamento correcto para el paciente correcto y luego sella los frascos y lo envía al frente para ser recogidos. El robot es un dispositivo de tiempo muy eficiente que depende de la farmacia a las recetas de relleno.
Robot RX de McKesson es otro producto de salud robótica que ayuda a las farmacias a distribuir miles de medicamentos diariamente con poco o sin errores. El robot puede ser diez pies de ancho y 30 metros de largo y puede albergar cientos de diferentes tipos de medicamentos y miles de dosis. La farmacia ahorra muchos recursos como miembros del personal que de lo contrario no están disponibles en una industria escasos recursos. Usa un electromecánicos cabeza junto con un neumática sistema para capturar cada dosis y entregarla a su ubicación surtida o dispensado. La cabeza se mueve a lo largo de un solo eje mientras se gira 180 grados para tirar de los medicamentos. Durante este proceso se utiliza Código de barras tecnología para verificar su tirando el medicamento correcto. Luego entrega el medicamento a un paciente específico bin en una cinta transportadora. Una vez que el recipiente está lleno con todos los medicamentos que necesita un paciente determinado y que las acciones del robot, el cubo es entonces liberado y vuelto hacia fuera sobre la cinta transportadora a un técnico esperando para cargarla en un carro para su entrega a la planta.
Robots de investigación
Mientras que la mayoría de los robots hoy están instalados en las fábricas o casas, realizando el trabajo o la vida salvar puestos de trabajo, muchos nuevos tipos de robot se están desarrollando en Laboratorios Por todo el mundo. Gran parte de la investigación en robótica se centra no en tareas industriales específicas, pero en las investigaciones sobre nuevos tipos de robot, formas alternativas de pensar o de diseño de robots y nuevas maneras de fabricarlos. Se espera que estos nuevos tipos de robot será capaces de resolver problemas del mundo real cuando se finalmente se dieron cuenta.[citación necesitada]
Nanorobots

Nanorrobótica es el tecnología emergente campo de la creación de máquinas o robots cuyos componentes están en o cerca de la escala microscópica de un nanómetro (10−9 metros). También conocido como "nanobots" o "Nanos", ellos se construirán de máquinas moleculares. Hasta ahora, los investigadores han producido principalmente sólo partes de estos sistemas complejos, tales como cojinetes, sensores, y motores moleculares sintéticos, pero también se han realizado los robots funcionan como los participantes al concurso nanobótico Robocup.[130] Los investigadores también esperan poder crear robots todo tan pequeño como virus o bacterias, que pueden realizar tareas en una escala minúscula. Posibles aplicaciones incluyen cirugía micro (a nivel de individuo células), niebla de utilidad,[131] fabricación, armamento y limpieza.[132] Algunas personas han sugerido que si hubo nanobots que podría reproducirse, la tierra se convirtiera en"goo gris", mientras que otros argumentan que este resultado hipotético es una tontería.[133][134]
Robots reconfigurables
Unos investigadores han investigado la posibilidad de crear robots que pueden alterar su forma física para una tarea en particular,[135] como la ficción T-1000. Los robots reales son cerca eso sofisticado sin embargo y consisten principalmente en un pequeño número de unidades en forma de cubo, que puede mover en relación a sus vecinos. Algoritmos han sido diseñados en caso de que estos robots se convierten en una realidad.[136]
Robots suaves
Robots con silicona cuerpos y actuadores flexible (músculos de aire, polímeros electroactivos, y ferrofluidos), controlada mediante lógica difusa y redes neuronales, mira y siente diferente a los robots con los esqueletos rígidos y pueden tener comportamientos diferentes.[137]
Enjambre de robots

Inspirado por colonias de insectos tales como hormigas y abejas, los investigadores están modelando el comportamiento de enjambres miles de pequeños robots que realicen juntos una tarea útil, como encontrar algo oculto, limpieza o espionaje. Cada robot es bastante simple, pero la comportamiento emergente de la nube es más compleja. El conjunto de los robots puede ser considerado como un solo sistema distribuido, de la misma manera una colonia de hormigas puede ser considerada un superorganismo, exhibiendo inteligencia de enjambre. Los enjambres más grandes creados hasta el momento incluyen el enjambre de iRobot, el proyecto SRI/MobileRobots CentiBots[138] y el enjambre de proyecto Open-source Micro-robótica, que se utilizan para investigar los comportamientos colectivos.[139][140] Los enjambres son también más resistentes al fracaso. Mientras que un robot grande puede fallar y arruinar a una misión, un enjambre puede continuar incluso si varios robots fallan. Esto podría hacerlos atractivos para las misiones de exploración espacial, donde el fracaso es normalmente extremadamente costosa.[141]
Robots interface haptica
Robótica también tiene aplicación en el diseño de realidad virtual interfaces. Robots especializados son de uso generalizado en la háptica comunidad de investigación. Estos robots, llamados "interfaces hápticos", permiten la interacción de usuario táctil con entornos reales y virtuales. Fuerzas robóticas permiten simular las propiedades mecánicas de los objetos "virtuales", que los usuarios pueden experimentar a través de su sentido de contacto.[142]
Entretenimiento
- Robots Poledancing
Algunos robots utilizan para entretenimiento y como una demostración de la tecnología más reciente. Este ágil automoton es un ejemplo perfecto de este proceso. Siendo los principales lugares de interés en CE-BIT, la más grande del mundo la Feria de Hanover, Alemania.[143]
Desarrollo futuro
Tendencias tecnológicas
Han surgido varias técnicas para el desarrollo de la ciencia de la robótica y los robots. Un método es robótica evolutiva, en que un número de diferentes robots es sometido a pruebas. Aquellos que se desempeñan mejor se utilizan como modelo para crear una "generación" posterior de robots. Otro método es robótica del desarrollo, que rastrea los cambios y el desarrollo dentro de un robot único en las áreas de resolución de problemas y otras funciones.
Desarrollo tecnológico
Tendencias generales
Japón espera que la comercialización a gran escala de los robots de servicio para el año 2025. Mucha investigación tecnológica en Japón está liderado por agencias del gobierno japonés, particularmente el Ministerio de comercio.[144]
Como los robots se convierten más avanzados, eventualmente pueden haber un sistema operativo de computadora estándar diseñado principalmente para los robots. Sistema operativo robot se establece un código abierto de programas que se están desarrollados en La Universidad de Stanford, la Massachusetts Institute of Technology y el Universidad técnica de MunichAlemania, entre otros. ROS proporciona métodos para programa de navegación de un robot y los miembros independientemente del hardware específico involucrado. También proporciona comandos de alto nivel para artículos tales como reconocimiento de imágenes e incluso abriendo puertas. Cuando ROS botas hasta el ordenador de un robot, obtendría datos sobre atributos tales como la longitud y el movimiento de las extremidades de los robots. Lo sería transmitir estos datos a los algoritmos de alto nivel. Microsoft también está desarrollando un sistema "Windows para robots" con su Robotics Developer Studio, que ha estado disponible desde el año 2007.[145]
Capacidades y nuevas funciones
Caterpillar Inc. está haciendo un camión que puede conducirse sin ningún operador humano.[146]
Muchas aplicaciones futuras de la robótica parecen obvias a la gente, aunque son mucho más allá de las capacidades de los robots disponibles en el momento de la predicción.[147][148] Tan pronto como 1982 personas estaban seguros de que algún día los robots sería:[149] 1. Limpie las piezas mediante la eliminación de moldeado de flash 2. la pintura de aerosol automóviles con absolutamente ninguna presencia humana 3. empacar cosas en cajas — por ejemplo, orientar y nido caramelos de chocolate en 4 cajas de dulces. hacer eléctrico arnés de cable 5. carga de camiones con cajas — un problema de embalaje 6. maneje blandas, tales como prendas de vestir y zapatos 7. trasquilar ovejas 8. prótesis 9. cocinar comida rápida y trabajan en otras industrias de servicio 10. robot casero.
Generalmente estas predicciones son demasiado optimistas en escala de tiempo.
Robot de lectura
Un alfabetizados o 'lectura robot' named Marge tiene inteligencia que viene desde el software. Puede leer los periódicos, encontrar y corregir las palabras mal escritas, aprender acerca de los bancos como Barclays y entender que algunos restaurantes son mejores lugares para comer que otros.[150]
Robots en la cultura popular
Literatura
Personajes de robóticas, androides (hombres/mujeres artificiales) o gynoids (las mujeres artificiales), y cyborgs (también"biónica hombres y mujeres", o los seres humanos con importantes mejoras mecánicas) se han convertido en un elemento básico de la ciencia ficción.
La primera referencia en la literatura occidental a sirvientes mecánicos aparece en Homeres Ilíada. En el libro XVIII, Hefesto, Dios del fuego, crea nueva armadura para el héroe Aquiles, asistido por robots.[151] Según el Rieu traducción, "Siervas oro se apresuró a ayudar a su maestro. Miraron como las mujeres de verdad y no sólo hablar y utilizar sus extremidades pero fueron dotados de inteligencia y entrenado en el trabajo hecho a mano por los dioses inmortales. " Por supuesto, las palabras "robot" o "android" no se utiliza para describirlos, pero sin embargo son dispositivos mecánicos en el aspecto humanos. "El primer uso de la palabra Robot fue en de Karel Čapek juego R.U.R. (Robots universales de Rossum) (escrito en 1920)". Escritor Karel Čapek nació en Checoslovaquia (República Checa).
Posiblemente fue el autor más prolífico del siglo XX Isaac Asimov (1920-1992)[152] que publicó sobre quinientos libros.[153] Asimov es probablemente mejor recordado por sus historias de ciencia ficción y sobre todo los de los robots, donde puso los robots y su interacción con la sociedad en el centro de muchas de sus obras.[154][155] Asimov examinado cuidadosamente el problema del conjunto de instrucciones robots podrían ser dados con el fin de disminuir el riesgo para los seres humanos y llegó a su ideal Tres leyes de la robótica:: un robot no puede dañar a un ser humano o, por inacción, permitir que un ser humano resulte dañado; un robot debe obedecer las órdenes dadas a él por los seres humanos, excepto donde tales órdenes entraría en conflicto con la primera ley; y un robot debe proteger su propia existencia, mientras dicha protección no entre en conflicto con la primera o segunda ley.[156] Éstos fueron introducidos en su cuento de 1942 "Evasivas", aunque anunciaba en un par de historias anterior. Más tarde, Asimov añadió el Zeroth Law: "un robot puede no dañar a la humanidad, o, por inacción, permitir que la humanidad resulte dañado"; el resto de las leyes se modifican secuencialmente para reconocer esto.
Según el Oxford English Dictionary, el primer paso en el cuento de Asimov"Mentiroso!"(1941) menciona que la primera ley es el uso lo más temprano posible registrado de la palabra robótica. Asimov no fue inicialmente consciente de ello; asumió que la palabra ya existía por analogía con mecánica, hidráulica, y otros términos similares que denotan las ramas de conocimiento aplicado.[157]
Problemas representados en la cultura popular
Los temores y preocupaciones acerca de los robots se han expresado en varias ocasiones en una amplia gama de libros y películas. Un tema común es el desarrollo de una raza de robots conscientes y muy inteligentes, motivados para apoderarse o destruir la raza humana. (Véase El terminador, Runaway, RoboCop, la Replicadores de Stargate, la Cylon en Battlestar Galactica, la Hombres cibernéticos en Doctor Who, La matriz, Enthiran y Yo, Robot.) Algunos robots de ficción están programados para matar y destruir; otros ganan inteligencia superhumana y habilidades mediante la actualización de su software y hardware. Son ejemplos de medios de comunicación populares donde el robot se convierte en mal 2001: una odisea del espacio, Planeta rojo y Enthiran. Otro tema común es la reacción, a veces llamada el "Valle inquietante", de inquietud e incluso repugnancia a la vista de los robots que imitan a los seres humanos muy de cerca.[63] Frankenstein (1818), a menudo llamada la primera novela de ciencia ficción, se ha convertido en sinónimo con el tema de un robot o un monstruo avanzando más allá de su creador. En el programa de televisión, Futurama, los robots son retratados como figuras humanoides que viven junto a los seres humanos, no como mayordomos robóticos. Todavía trabajan en la industria, pero estos robots realizan la vida cotidiana. Otros problemas pueden incluir eventos pertenecientes a sustitutos de robot (por ejemplo la película Sustitutos) donde el tejido de los organismos vivos es intercambiar con sistemas robóticos. Estos problemas pueden dejar muchas posibilidades donde los virus electrónicos o un pulso electromagnético (EMP) de electro puede destruir no sólo el robot pero matar el host/operador así como.
Véase también
- Inteligencia artificial
- Índice de artículos de robótica
- Justin (robot)
- Familia Juno Lely
- REEM (robot)
- Robot de manejo de líquidos
- Esquema de la robótica
- Robot App Store
- Locomoción robot
- Sensor táctil
Referencias
- ^ "Robot de cuatro patas, 'Chita', establece nuevo récord de velocidad". Reuters. 2012-03-06.
- ^ a b "robótica". Diccionarios Oxford. Retrieved 04 de febrero de 2011.
- ^ Pearce, Jeremy. "George C. Devol, Inventor del brazo del Robot, muere a los 99", El New York Times15 de agosto de 2011. Obtenido 07 de febrero de 2012. "En 1961, General Motors puso el primer brazo Unimate en una línea de montaje en la planta de la empresa en Ewing Township, Nueva Jersey, un suburbio de Trenton. El aparato fue utilizado para elevar y apilar las piezas de metal fundido a troquel tomadas calientes de sus moldes".
- ^ Akins, cristal. «5 empleos sustituidos por robots». Excelle. Monstruo. 2013-04-15.
- ^ a b Hoy, Greg (28 de mayo de 2014). "Robots podrían costar empleos economía australiana 5 millones, los expertos advierten, como las empresas para reducir costos". ABC News. Australian Broadcasting Corporation. 29 de mayo de 2014.
- ^ "Glosario de telecom"bot"". Alianza para soluciones de telecomunicaciones. 2001-02-28. archivado desde el original el 2008-07-14. de 2007-09-05.
- ^ Polk, Igor (2005-11-16). "Recorrido virtual de robot exposición RoboNexus 2005". Robonexus exposición 2005. de 2007-09-10.
- ^ Harris, Tom. "Cómo funcionan los Robots". ¿Cómo funciona. de 2007-09-10.
- ^ "Robot". Diccionario Merriam-Webster. Retrieved 2008-08-04.
- ^ a b c Needham, Joseph (1991). Ciencia y civilización en China: volumen 2, historia del pensamiento científico. Cambridge University Press. ISBN0-521-05800-7.
- ^ Currie, Adam (1999). "La historia de la robótica". de 2007-09-10.[link muerto]
- ^ Noct. L. att. 10
- ^ a b Needham, volumen 2, 54.
- ^ Deborah Levine Gera (2003). Antiguas Ideas griegas de habla, lenguaje y civilización. Oxford University Press. ISBN978-0-19-925616-7.
- ^ Mark E. Rosheim (1994). "Evolución del robot: el desarrollo de anthrobotics". p.2. Wiley-IEEE. ISBN 0-471-02622-0
- ^ "Robots entonces y ahora". BBC.
- ^ O ' Connor, J.J. y E.F. Robertson. "Biografía de Heron". La historia de MacTutor de archivo de las matemáticas. de 2008-09-05.
- ^ Strong 2007, p. 143.
- ^ Strong 2007, p. 133-134.
- ^ Fowler, Charles B. (octubre de 1967). "El Museo de la música: una historia de instrumentos mecánicos". Diario de los educadores de la música (MENC_ la Asociación Nacional de educación musical) 54 (2): 45 – 49. Doi:10.2307/3391092. JSTOR3391092.
- ^ "Primeros relojes". Un paseo a través del tiempo. Laboratorio de física NIST. Archivado de el original en 2008-05-31. de 2008-08-11.
- ^ a b New Scientist (IPC revistas): 32-35. 06 de julio de 2007.
- ^ "Robots de Leonardo da Vinci". Leonardo3.net. de 2008-09-25.
- ^ Jane Marie derecho, Marionetas de Nostalgia – la vida, muerte y renacimiento de la japonesa Awaji [[{{subst:DATE}} |{{subst:DATE}}]][desambiguación necesitó] Tradición Ningyo1997, Princeton University Press, ISBN 978-0-691-02894-1
- ^ Madera, Gabby. "Muñecas vivientes: una historia mágica de la búsqueda de vida mecánica", El guardián2002-02-16.
- ^ Edwyn Gray, los torpedos del siglo XIX y sus inventores, página 18
- ^ Gray, Edwyn (2004). Los torpedos del siglo XIX y sus inventores. Naval Institute Press. ISBN1-59114-341-1.
- ^ Marc Seifer vida y época de Nikola Tesla, libros de google página 1893
- ^ Benjamin Franklin Miessner, Radiodynamics: El Control inalámbrico de torpedos y otros mecanismos, D. Van Nostrand Company, 1916, página 83
- ^ U.S. 613809
- ^ "Tesla – maestro del rayo". PBS.org. de 2008-09-24.
- ^ "AH Reffell & Eric Robot (1928)".
- ^ "Sueños de robot: la historia extraña de búsqueda de un hombre para reconstruir su amigo de la infancia mecánico". Los tiempos libres de Cleveland. de 2008-09-25.[link muerto]
- ^ Scott Schaut (2006). Robots de Westinghouse: 1924-hoy. Mansfield Memorial Museum. ISBN0-9785844-1-4.
- ^ Owen Holanda. "El archivo en línea de Walter gris". de 2008-09-25.
- ^ Waurzyniak, Patrick (julio de 2006). "Amos de la fabricación: Joseph F. Engelberger". Sociedad de ingenieros de fabricación 137 (1). de 2008-09-25.[link muerto]
- ^ "Robot Hall of Fame – Unimate". Universidad Carnegie-Mellon. de 2008-08-28.[link muerto]
- ^ "Del nacional Inventor salón de la fama 2011". Inventar ahora. 2011-03-18.
- ^ "Historia de la empresa". Fuji Yusoki Kogyo Co.. de 2008-09-12.[link muerto]
- ^ "Robots industriales de KUKA FAMULUS". de 2008-01-10.[link muerto]
- ^ "Historia de Robots industriales". 27 / 10 / 2012 obtenido.
- ^ "Quienes somos".
- ^ a b Zunt, Dominik. "En realidad quien ha inventado la palabra"robot"y qué significa?". El sitio web Čapek de Karel. de 2007-09-11.
- ^ "Raíz indoeuropea '' * orbh-''". Web.Archive.org. 2008-05-12. 2014-02-08.
- ^ "Online Etymology Dictionary". 2012-06-10.
- ^ P. Moubarak, P. Ben-Tzvi, adaptable manipulación de un Robot móvil del mecanismo de híbrido, en actas de IEEE International Symposium on robótica y entornos de sensores, Rosa 11, 2011, Montreal, Canadá, págs. 113-118.
- ^ "Definición de un robot" (PDF). Dansk Robot Forening. Archivado de el original en 2008-07-15. de 2007-09-10.
- ^ "Sitios de estándares relacionados con robótica". Red de investigación de robótica Europea. de 2008-07-15.
- ^ Definición provisional de Robots de servicio[link muerto] Inglés, 27 de octubre de 2012
- ^ Mitgang, Lee (25 de octubre de 1983). "'Nova' 'Talking Turtle' Pofiles sumo sacerdote del movimiento de computadoras de la escuela ". Gainesville Sun.
- ^ Barnard, Jeff (29 de enero de 1985). "Los robots en la escuela: juegos o aprendizaje?". Observador-periodista (Washington). 07 de marzo de 2012.
- ^ P. Moubarak, et al., Modular y Reconfigurable robótica móvil, revista de la robótica y sistemas autónomos, 60 (12) (2012) 1648 – 1663.
- ^ Rédaction (25 de diciembre de 2011). "Le Consorcio franco-quebequense Mix dévoile hijo projet de voiture volante". https://www.aerobuzz.fr/ (en francés) (https://www.aerobuzz.fr/). 07 de septiembre de 2012.
- ^ Scanlan, Steve, robótica Design Inc., Montreal. "Modularidad en robótica proporciona automatización para todos". Digital.EPT.CA. 07 de septiembre de 2012.
- ^ Fontaneria y climatización, revista (abril de 2010). "Los robots de limpieza de conductos". roboticsdesign.QC.CA/News.html (https://plumbingandhvac.CA/). 29 de abril de 2010.
- ^ "Universal Robots colaboran fuera de recintos | Ingeniería de control". Controleng.com. 2013-06-04.
- ^ Hagerty, James (18 de septiembre de 2012). "Baxter cabezales de trabajo'". Wall Street Journal (Nueva York: Dow Jones & Company). 29 de mayo de 2014.
- ^ John Markoff (18 de septiembre de 2012). "Un Robot con un toque tranquilizador". El New York Times. 18 de septiembre de 2012.
- ^ "Un terminador de Ping-Pong-jugar". Ciencia popular.
- ^ "Mejor robot 2009". gadgetrivia.com.[link muerto]
- ^ Los robots hoy y mañana: IFR presenta la encuesta de estadísticas de robótica mundial de 2007; Mundo robótica; 2007-10-29. retrieved 2007-12-14
- ^ Informes de Watanabe, Hiroaki; Redacción y presentación de informes adicionales por Negishi, Mayumi; Edición por Norton, Jerry; Los robots de Japón pegarse a ser campeón del mundo; Reuters; 2007-12-02. retrieved 2007-01-01
- ^ a b Ho, C. C.; MacDorman, K. F.; Pramono, Z. A. D. (2008). "Las emociones humanas y el valle inquietante: A GLM, MDS y ISOMAP análisis de calificaciones video robot". Proceedings of la tercera ACM/IEEE International Conference on Human-Robot Interaction. 11 – 14 de marzo. Amsterdam. de 2008-09-24.
- ^ a b Página Web AAAI de materiales sobre la ética de robot[link muerto].
- ^ Recopilación AAAI de artículos sobre los derechos de los[link muerto]Fuentes compilan hasta 2006.
- ^ Los científicos predicen cerebro Artificial en 10 años[link muerto], por Kristie McNealy M.D. 29 de julio de 2009.
- ^ Robot: Máquina simple mente trascendente Por Hans Moravec, libros de Google.
- ^ Robots conquistar casi caminar, leer, bailar, por Matthew Weigand, Corea del sur Itimes, lunes, 17 de agosto de 2009.
- ^ Enchufe y orar, película documental de Jens Schanze sobre las posibilidades de AI y la robótica.
- ^ a b Máquinas de preocupación de los científicos pueden ser más astuto que hombre Por John Markoff, El New York Times26 de julio de 2009.
- ^ La singularidad tecnológica viene: Cómo sobrevivir en la Era post humana, por Vernor Vinge, Departamento de ciencias matemáticas, Universidad Estatal de San Diego, (c) 1993 por Vernor Vinge.
- ^ La revolución de Robot de juego: un experto en tecnología militar pesa Terminator: salvación., Por P. W. Singer, slate.com jueves, 21 de mayo de 2009.
- ^ Adquisición de robot[link muerto], gyre.org.
- ^ Página de robot, Engadget.
- ^ Piden debate sobre robots asesinosPalmer Jason. Noticias de BBC, 03 de agosto de 2009.
- ^ Robot de tres vías augura futuro autónomoPor David Axe wired.com, 13 de agosto de 2009.
- ^ Nuevo informe financiado por la armada advierte de guerra Robots a "Terminator", por Jason Mick (Blog), dailytech.com, 17 de febrero de 2009.
- ^ Informe armada advierte de levantamiento del robot, sugiere una brújula moral fuerte, por Joseph L. Flatley engadget.com, 18 de febrero de 2009.
- ^ Nuevo papel para los guerreros robot;[link muerto] Abejones son sólo parte de una oferta para automatizar el combate. Ética virtual puede hacer que las máquinas toman las decisiones?, por Gregory M. Lamb, El Christian Science Monitor17 de febrero de 2010.
- ^ "Biomasa-comiendo Robot militar es vegetariano, empresa dice". Fox News Channel. 2009-07-16. 2009-07-31.
- ^ Shachtman, Noah (2009-07-17). "Sala de peligro lo que sigue en la compañía de seguridad nacional niega sus Robots se alimentan de los muertos". Atado con alambre. 2009-07-31.
- ^ Comunicado de prensa, RTI Inc. (16 de julio de 2009). Ciclón Power Technologies responde a rumores sobre Robot militar "Come carne", págs. 1-2.
- ^ Comunicado de prensa, RTI Inc. (6 de abril de 2009). "Proyecto breve resumen", CREADORA: Robot táctico energéticamente autónoma, págs. 22.
- ^ Manuel de Landa, Guerra en la edad de máquinas inteligentesNueva York: Zone Books, 1991, 280 páginas, tapa dura, ISBN 0-942299-76-0; Libro en rústica, ISBN 0-942299-75-2.
- ^ Yan (30 de julio de 2011). "Foxconn para sustituir a trabajadores con 1 millón de robots en 3 años". Agencia de noticias Xinhua. Retrieved 04 de agosto de 2011.
- ^ "obtenido Septiembre-03-11". Sciencedaily.com. 2014-02-08.
- ^ "Póngase en contacto con robots sistemas Pick y lugar". Sistemas de contacto. de 2008-09-21.
- ^ "Equipos de SMT pick-and-place". Assembleon. Archivado de el original en 2008-08-03. de 2008-09-21.
- ^ "Carrito inteligente". Seegrid. de 2007-09-13.
- ^ "Los fundamentos de vehículos guiados automatizados". Savant automatización, sistemas de AGV. de 2007-09-13.
- ^ "Jervis B. Webb". Webb SmartLoader. 02 de septiembre de 2011.[link muerto]
- ^ "SpeciMinder". CSS robótica. de 2008-09-25.
- ^ "Robot de Adán". RMT robótica. de 2008-09-25.[link muerto]
- ^ "Puede hacer". Aethon. Archivado de el original en 2008-08-03. de 2008-09-25.
- ^ "Eskorta robot". Fennec Fox Technologies. 25 / 11 / 2011 obtenido.
- ^ "Entrega Robots & AGV". Robots móviles. de 2008-09-25.[link muerto]
- ^ "Dante II, lista de documentos publicados". El Instituto de robótica de la Universidad Carnegie Mellon. de 2007-09-16.[link muerto]
- ^ "Misión Pathfinder de Marte: Rover Sojourner". NASA. 1997-07-08. de 2007-09-19.
- ^ a b "Robot asistida cirugía: sistema da Vinci quirúrgico". División de la Universidad Brown de biología y medicina. de 2007-09-19.
- ^ La utilización de sondas robóticas en espacio profundo misiones: caso de estudio de AI protocolos y requisitos de Energía NuclearActas de 2011 Conferencia Internacional sobre ingeniería mecánica, robótica y aeroespacial, de octubre de 2011.
- ^ Revisión: sondas, por Jeff Foust, lunes, 16 de enero de 2012. Revisión de sondas espaciales: 50 años de exploración de la Luna 1 hacia nuevos horizontes, por Philippe Séguéla Firefly, 2011.
- ^ "Celebridades fijó para alcanzar LongPen de Atwood". Canadian Broadcasting Corporation. 2007-08-15. de 2008-09-21.[link muerto]
- ^ Graham, Stephen (2006-06-12). "Ejército de robots de América". New Statesman. de 2007-09-24.[link muerto]
- ^ "Campo de batalla Robots: a Irak y más allá". Diario la industria de defensa. 2005-06-20. de 2007-09-24.
- ^ Shachtman, Noah (noviembre de 2005). "Los artificieros de Bagdad". Atado con alambre. de 2007-09-14.
- ^ Shachtman, Noah (28 / 03 / 2013). "Atado con alambre: primero armados Robots patrullando en Irak". Blog.Wired.com. 2014-02-08.
- ^ Shachtman, Noah (28 / 03 / 2013). "Atado con alambre: armados Robots empujados a policía". Blog.Wired.com. 2014-02-08.
- ^ "Ejército de robots de América". Popularmechanics.com. 2009-12-18. 2014-02-08.
- ^ El presente y el futuro del avión no tripulado teledirigido: una guía de campo ilustrada; Dentro del reino animal de especies más nuevos y más espectaculares del mundo de aviones no tripulados, de enjambre de insectos ' bots que pueden asaltar un edificio a un atacante estadounidense de siete toneladas invisible al radar en llamas. Por Eric Hagerman, Popular Science, 23 de febrero de 2010.
- ^ "Taranis: el avión de combate m del futuro". Ministerio de defensa. 2010-07-12. 2010-07-13.
- ^ Emery, Daniel (2010-07-12). "MoD levanta la tapa en prototipo de avión de combate no tripulados". Noticias de BBC. 2010-07-12.
- ^ "Taranis: los millones no tripulación stealth jet que alcanzará los objetivos en otro continente". Daily Mail (Londres). 2010-07-12. 2010-07-12.
- ^ AAAI Panel presidencial de AI Futures 2008 – 2009 estudio a largo plazoAsociación para el progreso de la Inteligencia Artificial. Obtenido 26 de julio de 2009.
- ^ Artículo en Asimovlaws.com[link muerto]Julio de 2004. Obtenido 27 de julio de 2009.
- ^ Dilema ético robótico edad poses; Noticias de la BBC; 2007-03-07. retrieved 2007-01-02;
- ^ Primera ley de Asimov: Japón establece reglas para RobotsPor Bill Christensen, elespectador.com, 26 de mayo de 2006.
- ^ Japón elabora normas para robots avanzadosUPI vía physorg.com, 06 de abril de 2007.
- ^ Informe elaborado por el Comité de política del gobierno japonés Robot industrial-construyendo un seguro y seguro sistema Social incorporando la convivencia de los seres humanos y RobotsJapón gobierno nota de prensa oficial, Ministerio de economía, comercio e industria, marzo de 2009.
- ^ Hacia el Robot humano Sociedad de convivencia: en la inteligencia de seguridad para la próxima generación de Robots, informe por Yueh-Hsuan Weng, China Ministerio del Interior, Revista Internacional de robótica Social7 de abril de 2009.
- ^ Evolución de los Robots aprenden a mentira uno al otroPopular Science, 19 de agosto de 2009.
- ^ "Rio Tinto Media Center – Rio Tinto impulsa flota de camiones sin conductor a 150 bajo el mío del programa futuro ™". Riotinto.com. 2014-02-08.
- ^ Adrian (2011-09-06). "Cocobolo blog – equipos mineros autónomos". Adrianboeing.blogspot.com. 2014-02-08.
- ^ "Atlas Copco – RCS". Atlascopco.com. 2014-02-08.
- ^ "Transmin – Rocklogic". Rocklogic.com.au. 2014-02-08.
- ^ Topping, Mike; Smith, Jane (1999). "Un Resumen de 1 mano, un Robot de rehabilitación para los discapacitados gravemente". Centro de CSUN en actas de congresos de discapacidad. 1999. el procedimiento: Sesión 59. 14 de agosto de 2010. "La versión temprana del sistema práctico 1 consistió en un brazo robótico Cyber 310 con cinco grados de libertad además de una garra."
- ^ Jeavans, Christine (2004-11-29). "Bienvenidos al futuro el envejecimiento". Noticias de BBC. de 2007-09-26.
- ^ "Manual estadístico de Japón: Capítulo 2 población". Oficina de estadísticas y estudios estadísticos y Training Institute. de 2007-09-26.[link muerto]
- ^ "Robótica futuro del cuidado del paciente". E-Health Insider. 2007-08-16. de 2007-09-26.[link muerto]
- ^ Michael Hahn (1997-04-01). "Fullerene Nanogears". NASA. de 2008-05-27.
- ^ "Nanobots jugar al fútbol". TechBirBal. 2014-02-08.
- ^ KurzweilAI.net: Utilidad niebla: las cosas que sueños están hechos de[link muerto]
- ^ "(Eric Drexler 1986) los motores de la creación, la época de la venida de la nanotecnología". E-drexler.com. 2014-02-08.
- ^ Chris Phoenix (diciembre de 2003). "De la química, Nanobots y política". Centro de nanotecnología responsable. 28 / 10 / 2007 obtenido.
- ^ Nanotecnología pionero mata a mitos "goo gris". Instituto de física electrónica diarios. 2004-06-07. 28 / 10 / 2007 obtenido.
- ^ (1996) LEGO (TM) s a las estrellas: MesoStructures activo, autómatas celulares cinéticos y nanomáquinas paralelo para aplicaciones espaciales
- ^ (Robert Fitch, Zack Butler y Daniela Rus) Reconfiguración de planificación para los Robots auto Reconfiguring heterogéneos
- ^ John Schwartz (2007-03-27). "En el laboratorio: Robots que Slink y sufrir". El New York Times. de 2008-09-22.
- ^ ((cite web|https://www.activrobots.com/Research/wheelchair.html%7Ctitle=Sri/ MobileRobots Proyecto de Centibot))
- ^ "Proyecto de micro-robótica open-source". 28 / 10 / 2007 obtenido.
- ^ "Enjambre". iRobot Corporation. 28 / 10 / 2007 obtenido.
- ^ Knapp, Louise (21 / 12 / 2000). "Mira, arriba en el cielo: Robofly". Atado con alambre. de 2008-09-25.
- ^ "La vanguardia del Haptics". MIT Technology review. de 2008-09-25.
- ^ "Pole-dancing robot introducido en el más grande del mundo lo justo". Metro. REINO UNIDO. 06 de marzo de 2012.
- ^ Investigación y desarrollo de Robots de servicio de última generación en Japón[link muerto]Informe del Ministerio de relaciones exteriores Reino Unido, por Yumiko Moyen, Ciencia e innovación de sección, Embajada británica, TokioJapón, enero de 2009.
- ^ Robots para obtener su propio sistema operativo[link muerto], por Mehret Tesfaye Ethipian Review, 13 de agosto de 2009.
- ^ La oruga conducir Auto Dump TruckPor Tim McKeough, Fast Company25 de noviembre de 2008.
- ^ "Robótica sensores táctiles – tecnologías y sistema". Springer.com. 2014-02-08.
- ^ Apellido primer nombre segundo nombre. "Transacción IEEE sobre robótica – edición especial sobre robot sentido del tacto". IEEEXplore.IEEE.org. 2014-02-08.
- ^ "Robótica en la práctica: las capacidades del futuro" por Joseph F. Engelberger. en "Mantenimiento y tecnología electrónica" revista 1982 agosto.
- ^ Robot puede leer, aprender como un ser humano https://www.msnbc.msn.com/ID/40534768/ns/technology_and_science-Science
- ^ "Potencial cómico: Q & A with Director Stephen Cole". La Universidad de Cornell. 21 / 11 / 2007 obtenido.[link muerto]
- ^ Freedman, ed. por Carl (2005). Conversaciones con Isaac Asimov (1. ed.). Jackson: Prensa Univ. de Mississippi. p. vii. ISBN978-1-57806-738-1. Retrieved 04 de agosto de 2011. "... posiblemente el más prolífico"
- ^ Oakes, Elizabeth H. (2004). Escritores americanos. Nueva York: Hechos en el archivo. p. 24. ISBN978-0-8160-5158-8. Retrieved 04 de agosto de 2011.
- ^ Escribió "más de 460 libros así como miles de artículos y comentarios" y era el "tercer más prolífico de todos los tiempos [y] uno de los fundadores de la moderna ciencia ficción". White, Michael (2005). Isaac Asimov: una vida del gran maestro de la ciencia ficción. Carroll & Graf. págs. 1 – 2. ISBN0-7867-1518-9.
- ^ R. Clarke. "Leyes de Asimov de robótica – implicaciones para la tecnología de la información". Universidad Nacional de Australia/IEEE. de 2008-09-25.
- ^ Seiler, Edward; Jenkins, John H. (2008-06-27). "Isaac Asimov FAQ". Isaac Asimov Home Page. de 2008-09-24.
- ^ White, Michael (2005). Isaac Asimov: Una vida del gran maestro de la ciencia ficción. Carroll & Graf. p. 56. ISBN0-7867-1518-9.
Lectura adicional
- Glaser, Horst Albert y Rossbach, Sabine: el ser humano Artificial, Frankfurt/M., Bern, Nueva York 2011 "El ser humano Artificial"
- Artículo TechCast serie, Jason Rupinski y Richard Mix, "Las actitudes del público a los androides: Robot género, tareas y precios"
- Cheney, Margaret [1989:123] (1981). Tesla, hombre sin tiempo. Prensa de Dorset. Nueva York. ISBN 0-88029-419-1
- Craig, J.J. (2005). Introducción a la robótica. Pearson Prentice Hall. Upper Saddle River, NJ.
- Gutkind, L. (2006). Casi humano: Fabricación de Robots piensan. Nueva York: W. W. Norton & Company, Inc.
- Needham, Joseph (1986). Ciencia y civilización en China:: Volumen 2. Taipei: Cuevas Books Ltd.
- Neoyorquino de Sotheby's. La colección de Robot de juguetes de hojalata de Matt Wyse, (1996)
- Tsai, W. L. (1999). Robot análisis. Wiley. Nueva York.
- DeLanda, Manuel. Guerra en la edad de máquinas inteligentes. 1991. viraje. Nueva York.
- Diario de campo robótica
Enlaces externos
| Encontrar más información sobre Robot en Copro hermana proyectos | |
| Definiciones y traducciones de Wikcionario | |
| Los medios de comunicación de Commons | |
| Libros de texto de Wikilibros | |
| Recursos de aprendizaje de Wikiversidad | |
- Robótica en DMOZ
- Portal de robótica
- Investigación
- Fundación Internacional de investigación de robótica (IFRR)
- Revista Internacional de investigación de robótica (IJRR)
- Robótica y automatización sociedad (RAS) en IEEE
- División de robótica en NASA
- Laboratorio de integración hombre-máquina en Universidad Estatal de Arizona
- Educación
- Certificación de robótica De George Brown College
- Campo y robótica espacial en MIT
- Capacitación robótica en CMU
|
|||||||||||||||||||||||||||||||||

|
||||||||||||||||||||||||||||||||||||||||||||||